Lecture 3 - Forward Kinematics
What is Forward Kinematics?
Determining the position and orientation (pose) of the end-effector with respect to the base as a function of each joint motion (
Kinematic Chains
Transformations
Going to the next frame (
Going to the end-effector frame (
Forward Kinematics Approaches
Geometric Approach
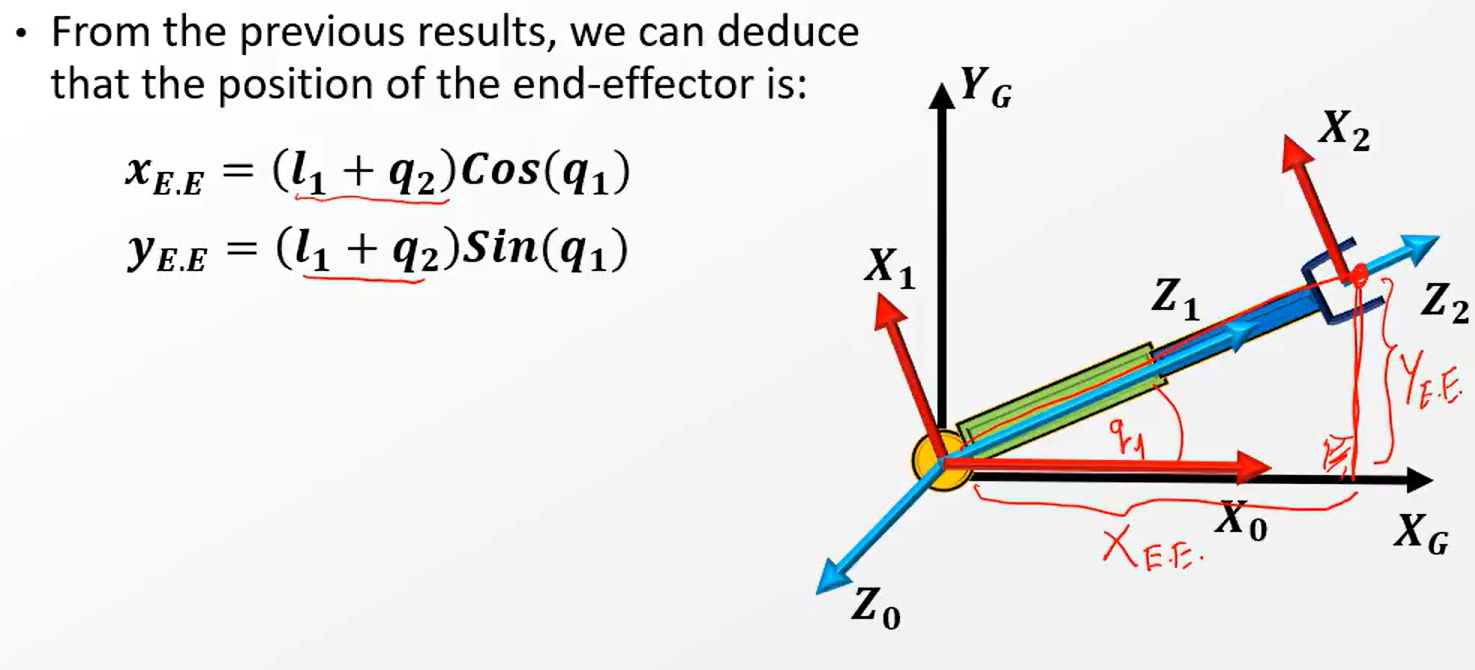
- Suitable for simple problems
- Suitable for getting the position of the end effector only, not orientation
DH Convention
Frames
- Assign axes on the joints
- Assign axes on the last important link (manipulator)
Transformation Parameters
We are just moving from the origin of the current frame to the origin of the next frame
It's like asking: how can we make the current frame become in the same orientation and position as the next frame?
We just do it in 4 steps
| Motion | Parameter | Name |
|---|---|---|
| Rotating around the current z axis to make the x axis of the current frame parallel to the x axis of the next frame | Joint angle | |
| Translating along the current z axis to intersect with the x axis of the next frame | Joint offset | |
| Translating along the new x axis (x axis of the next frame) to arrive at the origin of the next frame | Link length | |
| Rotating around the new x axis of the next frame to make the current z axis align with the next z axis | Link twist | |
This results in a total homogenous transformation matrix from frame
To get the transformation from the base frame to the end effector frame we just multiply the transformations between each two frames together
Resources
Lectures
- L03_Intro to Robotics_Lb1_DH-Convention.mp4
- Robotics: Lecture 04 (Forward Kinematics)
- Industrial Robotics : Forward Kinematics Part(1)
- Industrial Robotics : Forward Kinematics Part(2)
YouTube Channels
Examples
- Intro2Robotics6b: DH for spherical wrist, 6DOF arms: cylindrical & Stanford, SCARA
- Robotics: Lecture 05 (Examples on Forward Kinematics) - part II
- Robotics: Lecture 05 (Examples on Forward Kinematics)
- D-H parameter 14 - YouTube
- 4-kinematics of serial Manipulators Forward Kinematics part 2 كيناماتيكا الروبوتات - YouTube
- Carnegie Mellon University
Videos
Extra
- Lec 10: Rotation Matrix using Rodrigues formula using Matlab -الطريقة الاسهل لايجاد مصفوفة الدوران
- Lec 14: Forward Kinematics using Screw theory - No need for DH parameters - YouTube
- Linkage Mechanism Designer and Simulator – David Rector
- Getting Started as a Robotics Software Engineer! - YouTube
- Robotics101 from VisCircuit: Making Robotics Easy to Learn through Visualization
- Wiki Index - Robotics Knowledgebase